
1 引言
随着人工智能、高端制造和新材料等先进技术的发展,国内机器人产业进入高速发展阶段。在教育娱乐、医疗康复和仓储服务等领域,机器人已经越来越多地融入人们的生活和工作中(陈丹, 2025)。在日益加深的人与机器人共处的新时代,人对机器人的态度将会影响人与机器人关系的和谐程度(许丽颖 等, 2025; Nijssen et al., 2021)。因此,越来越多的研究者开始关注人对机器人态度的研究(范文琪 等, 2025; 罗傲, 张增一, 2024; 赵欣 等, 2024; Peter et al., 2021; Yam et al., 2023)。
量表法是当前探究人对机器人态度的重要方法。国内外研究者针对人对机器人的态度编制或修订了相关量表。在国外的量表编制中,有些研究者主要关注人对机器人的情感态度。这些量表包括Nomura等人(2006)开发的机器人消极态度量表、Yogeeswaran等人(2016)编制的感知机器人威胁量表以及Ehrenbrink和Möller(2018)开发的抗拒心理量表。有些国外研究者则主要关注人对机器人社会属性的态度。这些量表包括Carpinella等人(2017)从宜人性、能力和消极特点的角度开发的机器人社会属性量表、Banks和Edwards(2019)开发的人对机器人社交距离认知的量表以及Balazadeh(2023)基于“亲密接受度”这一角度,开发的包含交流、社交距离和亲密行为在内的机器人态度量表。然而,国内有关人对机器人态度的中文版量表较少。已有的量表包括毕轩懿等人(2023)基于Nomura等人翻译和修订的机器人消极态度量表,以及李军等人(2023)基于国外旅游业服务类机器人态度的相关量表(Di Nuovo et al., 2018; Heerink et al., 2010; Park & Kwon, 2016)修订的服务机器人态度量表。但是,国内修订的机器人态度量表存在一些不足。首先,毕轩懿等人开发的机器人消极态度量表的应用范围比较窄,只适用于测量人对机器人的消极态度,无法系统和全面地反映人对机器人的整体态度。其次,李军等人的服务机器人态度量表虽包含了积极态度和消极态度两个层面,但该量表在修订过程中缺少验证性因子分析。最后,毕轩懿等人修订的机器人消极态度量表关注于中老年群体(45~86岁),而李军等人修订的服务机器人态度量表关注于中青年群体(21~40岁)。这些量表关注的人群分布相对比较集中,无法对更大年龄范围的民众群体的机器人态度进行测量。基于以上不足,本研究将采用更加规范的量表编制方法,编制能系统和全面地反映民众对机器人态度的量表。
值得注意的是,当前有关人的态度存在诸多理论。其中较为广泛应用的理论包括三元态度理论(又称为ABC态度模型, the affect, behavior, and cognition model)、技术接受模型(technology acceptance model, TAM)与技术接受和使用统一理论(the unified theory of acceptance and use of technology, UTAUT)等。三元态度理论用于解释人的态度如何形成,该理论包含认知(cognition)、情感(affect)和行为(behavior)三个成分。认知成分代表着人对态度对象有关的事实、知识和信念的了解程度;情感成分代表着人对态度对象有关的积极或者消极感觉;行为成分代表着人对态度对象有关的反应(Taylor et al., 2005)。技术接受模型用于解释和预测人对信息技术的接受程度,该模型认为感知易用性(个体认为使用某一个特定系统会轻松省力的程度)和感知有用性(个体认为使用某一个特定系统会提高其工作效率的程度)是影响人对信息技术使用的重要影响因素(Davis, 1989)。技术接受和使用统一理论是基于技术接受模型等前人研究模型的基础上提出来的,用来预测人对技术的接受和使用程度。该理论包含四个核心决定因素(绩效期望、努力期望、社会影响和便利条件),以及四个调节因素(经验、自愿性、性别和年龄),这些因素会共同影响人们的使用意愿和行为(Venkatesh et al., 2003)。然而,技术接受模型与技术接受和使用统一理论存在一些不足,体现在这些模型缺乏一定的理论深度,而且缺乏整体分析(许丽颖, 喻丰, 2020)。相比于技术接受模型与技术接受和使用统一理论,三元态度理论是心理学中经典的态度理论,被广泛运用于人的态度测量研究中,具有较好的理论深度;而且该理论包含的内容更系统和全面(包含认知、情感和行为),使得理论的整体性更强。因此,研究1将以三元态度理论作为理论基础,编制民众机器人态度量表。
越来越多的研究者关注人格在人对机器人的态度中的作用。但是,其结果目前还存在争议。Morsunbul(2019)发现人格中的外向性和开放性是人对机器人的态度的重要影响因素。其后,Esterwood等人(2021)在一项元分析的结果中发现,除了人格中的外向性和开放性以外,宜人性也是人对机器人的态度的重要影响因素之一。然而,另一些研究者并未发现人格中的外向性、开放性和宜人性会影响人对机器人的态度(Conti et al., 2017; Damholdt et al., 2015; Dang & Tapus, 2015; Gockley & Matarić, 2006)。因此,研究2将在研究1编制新量表的基础上,进一步探究人格在人对机器人态度中的作用。
2 研究1:民众机器人态度量表的编制
2.1 研究方法
2.1.1 被试
向全国各城市民众发放线上问卷883份。其中,将未通过测谎题或答题时间异常(小于2分钟或大于30分钟)的问卷作为无效问卷,最终获得699份有效问卷,有效回收率79.16%。被试基本信息见表1 。对该数据进行随机分组后,获得样本1(n1=399)和样本2(n2=300)。将样本1用于项目分析以及探索性因子分析;样本2用于验证性因子分析以及信效度验证。
表1 被试人口学变量分布(n=699) |
| 类别 | 人数 | 百分比(%) | |
| 性别 | 男 | 200 | 28.61 |
| 女 | 499 | 71.39 | |
| 年龄 | 16岁以下 | 5 | 0.72 |
| 16~25岁 | 272 | 38.91 | |
| 26~35岁 | 144 | 20.60 | |
| 36~60岁 | 241 | 34.48 | |
| 60岁以上 | 37 | 5.29 | |
| 职业 | 学生 | 256 | 36.62 |
| 企业工作人员 | 76 | 10.87 | |
| 政府机关/事业单位工作人员 | 237 | 33.91 | |
| 农民 | 10 | 1.43 | |
| 其他 | 120 | 17.17 | |
| 文化程度 | 初中及以下 | 32 | 4.58 |
| 高中或中专 | 65 | 9.30 | |
| 大专或本科 | 366 | 52.36 | |
| 硕士及以上 | 236 | 33.76 | |
| 目前的居住地 | 城市 | 597 | 85.41 |
| 农村 | 102 | 14.59 | |
| 家庭人均月收入 | 2000元以下 | 57 | 8.15 |
| 2000~4000元 | 163 | 23.32 | |
| 4000~6000元 | 156 | 22.32 | |
| 6000~8000元 | 129 | 18.46 | |
| 8000元以上 | 194 | 27.75 |
2.1.2 量表维度确立与项目编制
在综合分析当前机器人测量工具的结构维度以及结合三元态度理论的基础上,本研究编制的民众机器人态度量表由三个分量表组成:认知分量表、情感分量表和行为分量表。其中,认知分量表包括五个维度:事实知识、感知有用性、感知易用性、感知信任和感知智力。该五个维度的划分是结合三元态度理论中认知成分的定义(Taylor et al., 2005)以及当前相关研究(王莉莉 等, 2024; Bartneck et al., 2009)的基础上提出的。事实知识指个体对机器人有关发展历史的了解程度;感知有用性指个体对机器人感到有用的程度;感知易用性指个体对机器人感到容易使用的程度;感知信任指个体对机器人感到信任的程度;感知智力指个体对机器人感到智能的程度。情感分量表包括两个维度:积极情感和消极情感。积极情感指个体对机器人产生的积极感觉的程度;消极情感指个体对机器人产生消极感觉的程度。行为分量表包括两个维度:使用意愿和亲密意愿。使用意愿指个体愿意使用机器人的程度;亲密意愿指个体愿意与机器人产生亲密行为的程度。最后,根据认知分量表、情感分量表和行为分量表中的相应维度,对量表的项目进行编制。
2.1.3 量表维度与项目的初步修订
项目组首先邀请心理学等相关领域的3位专家(1名教授和2名副教授)对题目及维度进行评审。随后,研究课题组(包括2名心理测量学讲师、9名心理学硕士研究生、8名心理学本科生和1名语言学本科生)对题目语义内容进行审查。经过三轮修订后,初版量表保留了49道题目。这些题目严格符合各维度的操作性定义,保证了量表的内容效度。本量表采用5点计分法(1=“非常不同意”,2=“不同意”,3=“不确定”,4=“同意”,5=“非常同意”)。其中,消极情感维度的题目为反向计分。
2.1.4 统计方法
采用SPSS软件对样本1(n1=399)进行描述性统计、项目分析和探索性因子分析(exploratory factor analysis, EFA);对样本2(n2=300)进行验证性因子分析(confirmatory factor analysis, CFA)及信效度检验,其中CFA通过Mplus软件完成,信效度检验使用SPSS软件完成。效标工具为毕轩懿等人(2023)修订的机器人消极态度量表。采用以下标准对CFA模型适配性进行综合评估:(1)卡方自由度比(χ2/df):小于3为良好适配,小于5为可接受。(2)RMSEA:小于或等于0.10为可接受;小于0.08为合理适配;小于0.05为优秀适配。(3)CFI/TLI:大于或等于0.90为可接受,大于或等于0.95为严格适配。(4)SRMR:小于0.08为拟合良好(Hu & Bentler, 1999; Kline, 2015)。需要注意的是,本研究将认知、情感和行为划分为三个独立的分量表,每个分量表将进行单独的统计学分析。
2.2 结果
2.2.1 项目分析
首先,依据量表的总得分,对样本1(n1=399)被试进行排序。选出高分组(前27%)和低分组(后27%)进行独立样本t检验,淘汰在高分和低分组间没有显著差异的题目。结果表明,所有题目在两组间均表现出显著差异。然后进行题目与总分的相关性分析,剔除相关系数低于0.40的题目。基于结果,最终保留了48道题目用于探索性因子分析。
2.2.2 探索性因子分析
(1)认知分量表
样本1中认知分量表的结果显示:Bartlett球形检验χ2=4542.19(df=276)(p<0.001),KMO值为0.93。该结果表明数据适合进行因子分析。然而结果呈现出相关矩阵不是正定的问题,经过删除一道题后(原始题号为17)解决了这一问题。
采用主成分分析法进行因子分析,识别出有4个特征根超过1的公因子。碎石图建议提取3个因子。根据以上结果,本研究采用主轴因式分解方法对3因子、4因子模型进行分析,并使用最优斜交法进行数据旋转从而对各模型进行比较。结果发现4因子模型累计方差贡献率较高,且与最初的理论结构一致。因此,本研究选择4因子模型作为量表的初步结构。
本研究在EFA分析中删除题目的标准包括:(1)因子负荷小于0.40;(2)在多个因子上有载荷且载荷差异小;(3)题目不符合预设维度;(4)共同度小于0.2(McCoach et al., 2013)。最终删除4道题目(1道事实知识、1道感知有用性、2道感知易用性)。对于剩下的20个题目进行探索性因子分析。结果表明:4因子模型的累计方差贡献率达到58.16%。在剩余的题目中有6道题目(2道题目属于感知易用性,4道题目属于感知智力)载荷在有用性维度上。由于在前期编制感知易用性与感知智力维度的题目过程中,本研究已经结合前人文献,并经过相关领域专家的研究与讨论,保证了题目内容的准确性。最后,根据探索性因子分析并结合维度内容,本研究将感知易用性与感知智力归入感知有用性中。另外,根据探索性因子分析结果,事实知识可以分成历史事实知识和现在−未来事实知识。最终,认知分量表的维度为历史事实知识、现在−未来事实知识、感知有用性和感知信任。因子载荷数据见表2 。
表2 民众机器人态度认知分量表因子载荷 |
| 维度 | 题目 | 载荷 | 共同度 |
| 历史事实知识 | 1.我了解机器人的发展历史 | 0.79 | 0.62 |
| 2.我了解机器人领域的关键技术 | 0.85 | 0.70 | |
| 3.我了解机器人发展领域的代表性人物 | 0.84 | 0.71 | |
| 现在−未来事实知识 | 4.机器人已经开始变得越来越智能 | 0.60 | 0.56 |
| 5.机器人开始逐步融入人们的日常生活 | 0.74 | 0.49 | |
| 6.我认为机器人在未来会推动经济的发展和社会的进步 | 0.82 | 0.66 | |
| 感知有用性 | 8.机器人可以为人们提供准确和及时的信息 | 0.71 | 0.42 |
| 9.机器人可以为人们提供高质量的服务 | 0.64 | 0.53 | |
| 10.机器人可以成为人们生活和工作的助手 | 0.56 | 0.48 | |
| 11.机器人可以提高人们的工作效率 | 0.70 | 0.70 | |
| 14.我觉得与机器人互动是一件容易的事 | 0.49 | 0.45 | |
| 15.我觉得机器人的行为容易被理解 | 0.45 | 0.42 | |
| 22.我觉得机器人可以解决复杂问题 | 0.63 | 0.47 | |
| 24.我觉得机器人可以识别人们的行为和情绪 | 0.57 | 0.43 | |
| 25.我觉得机器人很智能 | 0.62 | 0.43 | |
| 26.我觉得机器人反应迅速 | 0.67 | 0.38 | |
| 感知信任 | 18.我相信机器人不会伤害人类 | 0.86 | 0.62 |
| 19.我觉得机器人可以保护用户的数据安全和隐私 | 0.52 | 0.40 | |
| 20.我觉得机器人能够在各种环境和任务中稳定运行 | 0.60 | 0.45 | |
| 21.我觉得机器人是可靠的 | 0.47 | 0.55 |
(2)情感分量表
情感分量表的结果显示:Bartlett球形检验的χ2=2617.42(df=55)(p<0.001),KMO值为0.89。该结果表明数据适合进行因子分析。主成分分析表明,有两个特征根大于1的公因子,且碎石图建议提取2或3个因子。根据以上结果并结合主轴因式分解分析,最终选择2因子模型作为情感分量表的结构。
情感分量表删除题目的标准与认知分量表相同。最终保留了全部11个项目,因子的累计方差贡献率达到67.10%,分别为积极情感和消极情感。本分量表因子的载荷见表3 。
表3 民众机器人态度情感分量表因子载荷 |
| 维度 | 题目 | 载荷 | 共同度 |
| 积极情感 | 27.我对机器人感兴趣 | 0.71 | 0.54 |
| 28.我喜欢机器人 | 0.65 | 0.51 | |
| 29.我会为机器人越来越智能而感到高兴 | 0.66 | 0.53 | |
| 30.如果机器人为我提供服务,我会感到开心 | 0.86 | 0.67 | |
| 31.我觉得接受机器人的服务是一件愉快的事 | 0.87 | 0.68 | |
| 消极情感 | 32.机器人使我感到焦虑 | 0.75 | 0.65 |
| 33.机器人使我感到紧张 | 0.82 | 0.63 | |
| 34.我害怕机器人 | 0.68 | 0.48 | |
| 35.机器人使我感到不安 | 0.77 | 0.60 | |
| 36.我对机器人感到恐慌 | 0.87 | 0.67 | |
| 37.我对机器人充满敌意 | 0.73 | 0.64 |
(3)行为分量表
行为分量表的结果显示:Bartlett球形检验的χ2=2358.77(df=66)(p<0.001),KMO值为0.92。该结果表明量表数据适合进行因子分析。主成分分析结果发现两个特征根大于1的公因子,碎石图建议提取2个因子。随后对2因子模型进行了主轴因式分解,并使用最优斜交法。最终确定2因子模型作为行为分量表的初步结构。
遵循认知分量表删除题目的标准,对行为分量表题目进行筛选。最终,行为分量表删除了5个题目。对保留的7个题目再次进行2因子因子分析。结果显示累计方差贡献率达到了72.43%,因子分别被命名为亲密意愿和使用意愿。其中,1道题目(原始题号47)的载荷由亲密意愿转换到使用意愿。这一转换基于其在因子分析中的表现以及与理论框架的一致性。行为分量表相关因子的载荷见表4 。
表4 民众机器人态度行为分量表因子载荷 |
| 维度 | 题目 | 载荷 | 共同度 |
| 使用意愿 | 38.我愿意主动学习机器人的使用方法 | 0.81 | 0.52 |
| 39.我愿意接受机器人的服务 | 0.77 | 0.58 | |
| 47.我愿意接近和触摸机器人 | 0.56 | 0.63 | |
| 亲密意愿 | 44.我愿意和机器人成为好朋友 | 0.71 | 0.69 |
| 45.如果有可能,我愿意接纳机器人成为家庭一员 | 0.83 | 0.64 | |
| 46.我愿意让机器人陪伴我 | 0.74 | 0.63 | |
| 48.我愿意和机器人分享自己的秘密 | 0.86 | 0.57 |
2.2.3 验证性因子分析
(1)认知分量表
对认知分量表的20道题目进行验证性因子分析,依据修正指数(modification indices, MI)来评估题目多重载荷或与题目相关的问题。第14题和第15题表现出多重载荷现象,因此剔除。移除这些题目后,4因子模型显示出良好的拟合指标,结果见表5 。基于上述分析,最终认知分量表保留了18个题目。因子命名为历史事实知识、现在−未来事实知识、感知有用性和感知信任。
表5 分量表的验证性因子分析拟合度指标 |
| 名称 | 指标 | ||||
| χ2/df | RMSEA | CFI | TLI | SRMR | |
| 认知态度分量表 | 2.91 | 0.08 | 0.90 | 0.88 | 0.06 |
| 情感态度分量表 | 3.38 | 0.08 | 0.96 | 0.94 | 0.04 |
| 行为态度分量表 | 2.65 | 0.07 | 0.98 | 0.96 | 0.03 |
(2)情感分量表
根据MI移除两道(28题和33题)相关性较高的题目后,2因子模型显示出良好的拟合指标,结果见表5 。最终因子命名为积极情感(4道题目)和消极情感(5道题目)。
(3)行为分量表
CFA结果显示2因子模型各项拟合指标良好,结果见表5 。最终因子命名为使用意愿(3道题目)和亲密意愿(4道题目)。
2.2.4 信度分析
(1)内部一致性信度
使用样本2对认知、情感、行为三个分量表进行内部一致性信度分析,结果显示信度良好。认知分量表的内部一致性(Cronbach’s α)信度为0.90,各个维度的内部一致性系数分别为:0.81、0.81、0.86和0.80。情感分量表的内部一致性信度为0.90,各个维度的内部一致性系数分别为:0.83和0.90。行为分量表的内部一致性信度为0.87,各个维度的内部一致性系数分别为:0.77和0.86。
(2)分半信度
对样本2中的34个题目按奇偶排序,并进行相关分析。结果显示,相关系数为0.91(p<0.001),表明量表的分半信度表现良好。
2.2.5 效度分析
(1)内容效度
为确保量表的内容效度,本研究在构建测量维度和编写题目时,详细审查了相关文献,并参考了一些已广泛使用且具有良好信效度的成熟量表。此外,本研究还邀请了心理学等领域的专家对题目进行了评估,以保证量表的内容能准确反映所测量的构念。
(2)效标关联效度
对本研究的认知分量表与效标工具进行相关分析,相关系数为−0.03(p=0.540),表明两者之间的相关性不显著。对情感分量表的消极和积极两个维度分别与效标进行相关分析,消极情感维度相关系数为0.51(p<0.01),显示出中等程度的显著相关性;而积极情感维度与效标的相关系数为−0.09(p=0.106),相关性不显著。行为分量表与效标的相关系数为−0.15(p<0.05),两者之间存在负向低等程度的显著相关。根据白学军等人(2020)与陆芳和付淑英(2022)的研究,如果效标测验与编制的量表测量的是两种相关而非完全相同的构念,那么中等程度的相关性可以表明量表具有较好的效标关联效度。因此,情感量表中的消极维度与效标工具之间的中等相关性,表明了该量表在效标关联效度方面表现良好。而认知和行为分量表与效标量表的测量内容不同,其结果为相关不显著或具有较小的相关系数,符合本量表编制的预期。最终,本研究的量表保留了34道题目,见表6 。
表6 民众机器人态度量表 |
| 维度 | 分维度 | 题号 | 题项 | 非常不同意 | 不同意 | 不确定 | 同意 | 非常同意 |
| 1 | 2 | 3 | 4 | 5 | ||||
| 认知 | 历史事实知识 | 1 | 我了解机器人的发展历史 | |||||
| 2 | 我了解机器人领域的关键技术 | |||||||
| 3 | 我了解机器人发展领域的代表性人物 | |||||||
| 现在−未来事实知识 | 4 | 机器人已经开始变得越来越智能 | ||||||
| 5 | 机器人开始逐步融入人们的日常生活 | |||||||
| 6 | 我认为机器人在未来会推动经济的发展和社会的进步 | |||||||
| 感知有用性 | 7 | 机器人可以为人们提供准确和及时的信息 | ||||||
| 8 | 机器人可以为人们提供高质量的服务 | |||||||
| 9 | 机器人可以成为人们生活和工作的助手 | |||||||
| 10 | 机器人可以提高人们的工作效率 | |||||||
| 11 | 我觉得机器人可以解决复杂问题 | |||||||
| 12 | 我觉得机器人可以识别人们的行为和情绪 | |||||||
| 13 | 我觉得机器人很智能 | |||||||
| 14 | 我觉得机器人反应迅速 | |||||||
| 感知信任 | 15 | 我相信机器人不会伤害人类 | ||||||
| 16 | 我觉得机器人可以保护用户的数据安全和隐私 | |||||||
| 17 | 我觉得机器人能够在各种环境和任务中稳定运行 | |||||||
| 18 | 我觉得机器人是可靠的 | |||||||
| 情感 | 积极情感 | 19 | 我对机器人感兴趣 | |||||
| 20 | 我会为机器人越来越智能而感到高兴 | |||||||
| 21 | 如果机器人为我提供服务,我会感到开心 | |||||||
| 22 | 我觉得接受机器人的服务是一件愉快的事 | |||||||
| 消极情感 | 23 | 机器人使我感到焦虑 | ||||||
| 24 | 我害怕机器人 | |||||||
| 25 | 机器人使我感到不安 | |||||||
| 26 | 我对机器人感到恐慌 | |||||||
| 27 | 我对机器人充满敌意 | |||||||
| 行为 | 使用意愿 | 28 | 我愿意主动学习机器人的使用方法 | |||||
| 29 | 我愿意接受机器人的服务 | |||||||
| 30 | 我愿意接近和触摸机器人 | |||||||
| 亲密意愿 | 31 | 我愿意和机器人成为好朋友 | ||||||
| 32 | 如果有可能,我愿意接纳机器人成为家庭一员 | |||||||
| 33 | 我愿意让机器人陪伴我 | |||||||
| 34 | 我愿意和机器人分享自己的秘密 |
3 研究2:民众机器人态度量表的应用研究:认知、情感和行为之间的关系及大五人格对其影响
3.1 研究方法
3.1.1 被试
向全国各城市民众发放线上问卷1875份。去除测谎题回答错误和答题时间异常的问卷后,最终获得有效问卷1567份,有效率为83.57%。被试基本信息见表7 。
表7 被试人口学变量分布(n=1567) |
| 类别 | 人数 | 百分比(%) | |
| 性别 | 男 | 805 | 51.37 |
| 女 | 762 | 48.63 | |
| 年龄 | 16岁以下 | 13 | 0.83 |
| 16~25岁 | 647 | 41.29 | |
| 26~35岁 | 602 | 38.42 | |
| 36~60岁 | 262 | 16.72 | |
| 60岁以上 | 43 | 2.74 | |
| 职业 | 学生 | 586 | 37.40 |
| 企业工作人员 | 535 | 34.14 | |
| 政府机关/事业单位工作人员 | 284 | 18.12 | |
| 农民 | 46 | 2.94 | |
| 其他 | 116 | 7.40 | |
| 文化程度 | 初中及以下 | 43 | 2.74 |
| 高中或中专 | 226 | 14.42 | |
| 大专或本科 | 1068 | 68.16 | |
| 硕士及以上 | 230 | 14.68 | |
| 目前的居住地 | 城市 | 1337 | 85.32 |
| 农村 | 230 | 14.68 | |
| 家庭人均月收入 | 2000元以下 | 56 | 3.57 |
| 2000~4000元 | 231 | 14.74 | |
| 4000~6000元 | 524 | 33.44 | |
| 6000~8000元 | 351 | 22.40 | |
| 8000元以上 | 405 | 25.85 |
3.1.2 研究工具
采用王孟成等人(2011)修订的中国大五人格问卷简式版(Chinese Big Five Personality Inventory Brief Version, CBF-PI-B)作为测量量表。该量表具有良好的信效度,神经质、严谨性、宜人性、开放性、外向性5个维度的Cronbach’s α系数分别为0.89、0.87、0.78、0.89、0.84。本研究使用Mplus软件进行结构方程模型的分析。
3.2 结果
3.2.1 民众机器人认知、情感及行为态度与大五人格之间的相关分析
对民众机器人认知、情感及行为态度与大五人格进行相关分析(见表8 )。结果显示,认知与情感之间呈中等强度的正相关(r=0.53, p<0.01),与行为之间则呈较强的正相关(r=0.73, p<0.01)。情感与行为之间也存在显著的正相关(r=0.58, p<0.01),即民众情感的变化在一定程度上会影响其对机器人的行为表现。另外,神经质与认知、情感和行为之间均呈显著负相关,而且相关值偏小。严谨性与认知、情感和行为之间存在显著的中等程度正相关。宜人性与认知、情感和行为有显著的低等程度正相关。开放性和外向性与认知、情感和行为之间呈显著的中、低等程度正相关。
表8 各变量之间的相关分析(n=1567) |
| 变量 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 1.认知 | |||||||
| 2.情感 | 0.53** | ||||||
| 3.行为 | 0.73** | 0.58** | |||||
| 4.神经质 | −0.32** | −0.50** | −0.26** | ||||
| 5.严谨性 | 0.56** | 0.51** | 0.47** | −0.51** | |||
| 6.宜人性 | 0.37** | 0.45** | 0.39** | −0.38** | 0.51** | ||
| 7.开放性 | 0.52** | 0.38** | 0.45** | −0.25** | 0.52** | 0.37** | |
| 8.外向性 | 0.42** | 0.29** | 0.37** | −0.43** | 0.46** | 0.36** | 0.54** |
注:*p<0.05,**p<0.01,***p<0.001,以下同。 |
综上所述,各变量之间均存在显著的相关性,表明机器人的认知、情感和行为之间以及大五人格的不同维度和民众机器人的认知、情感及行为态度之间有较强的相关性。
3.2.2 大五人格特质对民众机器人认知、情感及行为态度的影响
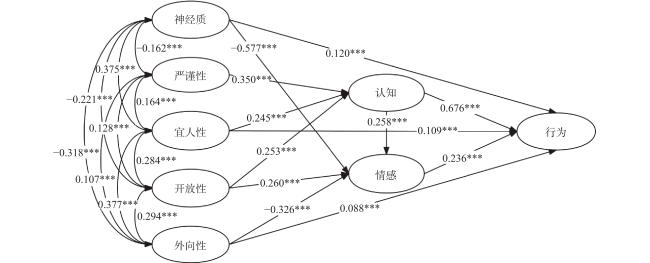
采用结构方程模型考察民众机器人认知、情感及行为态度之间的关系,以及大五人格特质对机器人认知、情感及行为态度的影响。根据研究1中的模型适配性依据可知,该结构方程模型各项拟合指标良好:χ2/df=4.29,RMSEA=0.05,95%CI=[0.051, 0.054],CFI=0.89,TLI=0.89,SRMR=0.06(见图1 )。统计结果显示,民众对机器人的认知态度正向预测其情感(β=0.26, p<0.001)和行为(β=0.68, p<0.001),民众对机器人的情感态度正向预测其行为(β=0.24, p<0.001)。另外,有关大五人格特质对机器人认知、情感及行为态度影响的结果表明,神经质显著负向预测对机器人情感态度(β=−0.58, p<0.001),但对行为的影响为正向(β=0.12, p<0.001)。严谨性显著正向预测机器人认知态度(β=0.35, p<0.001)。宜人性显著正向预测对机器人认知态度(β=0.25, p<0.001)和行为态度(β=0.11, p<0.001)。开放性显著正向预测机器人认知态度(β=0.25, p<0.001)和机器人情感态度(β=0.26, p<0.001)。外向性显著负向预测对机器人情感态度(β=−0.33, p<0.001),但显著正向预测对机器人行为态度(β=0.09, p<0.001)。
{kind=link}
{kind=link}
4 讨论
随着科技的进步,机器人正日益融入人类社会。但是,当前有关机器人态度相关的测量量表还存在一些不足,其中包括缺乏综合性测量量表、面向民众群体量表较少和当前相关量表编制还不够规范等问题。基于此,本研究以经典三元态度理论为基础编制民众机器人态度量表,并对民众机器人态度与大五人格之间的关系进行探究。
在研究1中,本研究基于三元态度理论,系统地编制了民众机器人态度量表。该量表包含认知、情感和行为三个分量表。经过课题组的编写与专家的评估,本研究初期编制的原始量表有49道题目。通过项目分析、探索性和验证性因子分析,最终保留了34道题目。其中,大部分题目符合原假定维度。在最终版量表中,将认知分量表中“感知易用性”和 “感知智力”两个维度纳入“感知有用性”维度。另外,根据探索性因子分析结果,事实知识维度再细分为两个子维度:事实知识1和事实知识2。其中,事实知识1的题目主要反映的是有关机器人过去历史的事实知识;而事实知识2的题目主要反映的是有关机器人现在和未来的事实知识。结合事实知识的题目以及研究课题组讨论,最终,本量表的认知分量表,包含的维度为:历史事实知识、现在−未来事实知识、感知有用性和感知信任;情感分量表包含维度为:积极情感和消极情感;行为分量表包含的维度为:使用意愿和亲密意愿。
本研究1采用内部一致性信度和分半信度作为信度的检验方法,检验结果表明民众机器人态度量表的信度均良好。在效度检验中,本研究通过查阅已有相关文献并结合专家对量表的评估意见,从而保证该量表具有较高的内容效度。研究1采用机器人消极态度量表(毕轩懿 等, 2023; Nomura et al., 2006)作为效标关联效度的检验工具。此效标与本研究中的情感分量表的消极维度有显著的中等相关,而且与积极情感维度、认知分量表和行为分量表的相关不显著或低相关。这表明该量表在情感分量表的消极维度与效标具有一致性,其他分量表或维度与效标具有较大差异。以上结果均符合量表设计初衷。
研究2对民众机器人态度中的认知、情感和行为之间的关系及大五人格对它们的影响进行探究。结果发现,在民众机器人的认知、情感和行为三者关系中,认知直接正向影响行为,而且也可以通过情感间接正向影响行为。不同维度的人格属性会影响不同的机器人态度内容。其中,严谨性正向影响认知;宜人性正向影响认知和行为;开放性正向影响认知和情感。另外,神经质和外向性都负向影响情感,但正向影响行为。Morsunbul(2019)发现宜人性、外向性与开放性负向预测人对机器人的消极态度。Esterwood等人(2021)在元分析的研究结果中也发现,具有外向性、开放性与宜人性的人会倾向接受与机器人的交互。因此,本研究结果表明了宜人性与开放性在对机器人态度的影响上具有跨文化的一致性。有趣的是,研究2发现人格中的外向性与机器人态度中的积极情感是负向关系,这揭示了中国民众人格中的外向性与机器人态度中的积极情感的关系。同时,本研究发现严谨性和神经质显著影响个体对机器人的态度。这可能是因为本研究将人对机器人的态度详细划分成了认知、情感和行为三个成分,从而导致严谨性和神经质对其影响会根据不同成分而有所差异。而前人的研究(Esterwood et al., 2021; Morsunbul, 2019)没有将这三个成分详细区分出来,从而导致一些人格特质对机器人态度的影响未能被发现。
研究2还表明,在人格特质对情感和行为反向的影响关系中,人在情感与行为上存在不一致性。有研究表明,态度与行为之间会存在不一致性(Yuan et al., 2023),即个体的回顾态度与情境化态度存在差异:回顾态度主要受个体分析系统的影响,而情境化态度主要受直接刺激−反应(即启发式系统)的影响。因此,回顾态度可能无法准确反映个体在即时情境中的认知。态度与行为之间的不一致性可能是由回顾态度与即时行为之间的不匹配引起的。本研究结果进一步揭示了人格在人对机器人态度上起重要作用。
本研究基于三元态度理论,采用更加规范的量表编制技术,综合认知、情感和行为三个角度编制民众机器人态度量表,并进一步探究了民众人格在机器人态度中的作用。本研究也存在一些局限。首先,本研究采用横断研究设计,探究了民众对机器人认知、情感和行为之间的关系,以及人格在民众机器人态度形成中的作用。未来可以采用纵向研究设计,进一步探究人格在民众机器人态度形成中的作用。其次,本研究针对普通民众群体编制机器人态度量表,没有考虑民众中的特殊人群(例如残障人士)可能对机器人有不同的态度。未来可以根据不同的民众群体,编制具体人群的机器人态度量表。
5 结论
(1)民众机器人态度量表由认知、情感和行为三个分量表构成,共包含34道题目,信效度良好。(2)民众对机器人的认知态度对其情感和行为态度具有显著的正向影响。(3)人格在民众机器人态度的形成过程中起重要作用。